
About me
I’m Jungwan Woo, an integrated M.S.–Ph.D. student in Electrical Engineering and Computer Science at DGIST. My research focuses on 3D perception and spatial intelligence for real-world, including LiDAR-based scene understanding, domain generalization, and spatio-temporal motion forecasting for autonomous driving. I am particularly interested in building robust 3D vision models that generalize across environments and sensor configurations, and in applying them to embodied AI and robotics in everyday scenarios. I am conducting my research under my advisor, Prof. Sunghoon Im.
Publications
Flow4D: Leveraging 4D Voxel Network for LiDAR Scene Flow Estimation
Jaeyeul Kim, Jungwan Woo, Ukcheol Shin, Jean Oh, Sunghoon Im
IEEE Robotics and Automation Letters (RA-L), 2025 Winner of the Argoverse 2 LiDAR Scene Flow Challenge at CVPR 2024 WAD
Paper
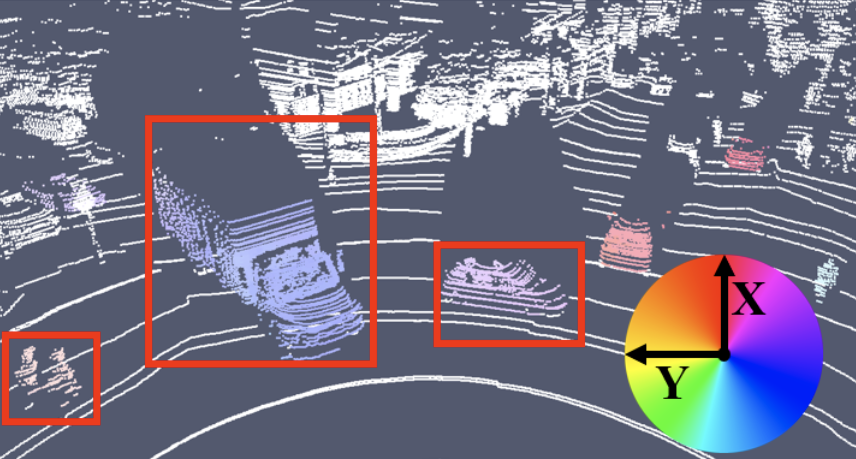
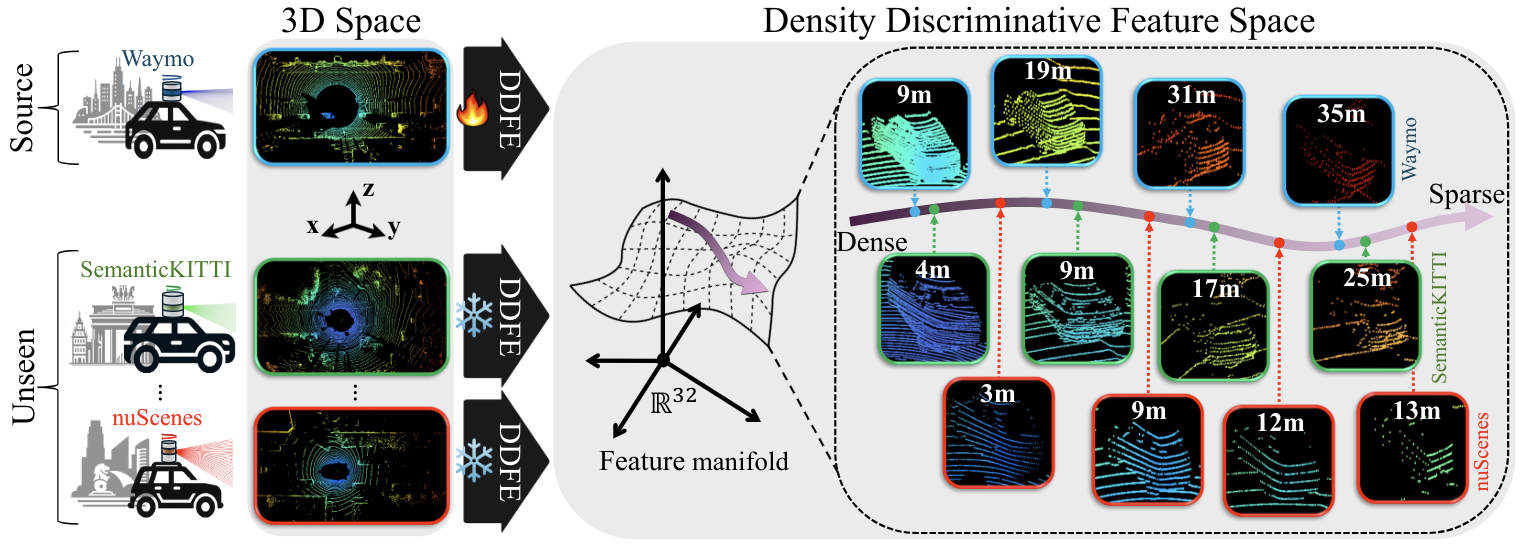
Rethinking LiDAR Domain Generalization: Single Source as Multiple Density Domains
Jaeyeul Kim*, Jungwan Woo*, Jeonghoon Kim, Sunghoon Im
European Conference on Computer Vision (ECCV), 2024.
Paper
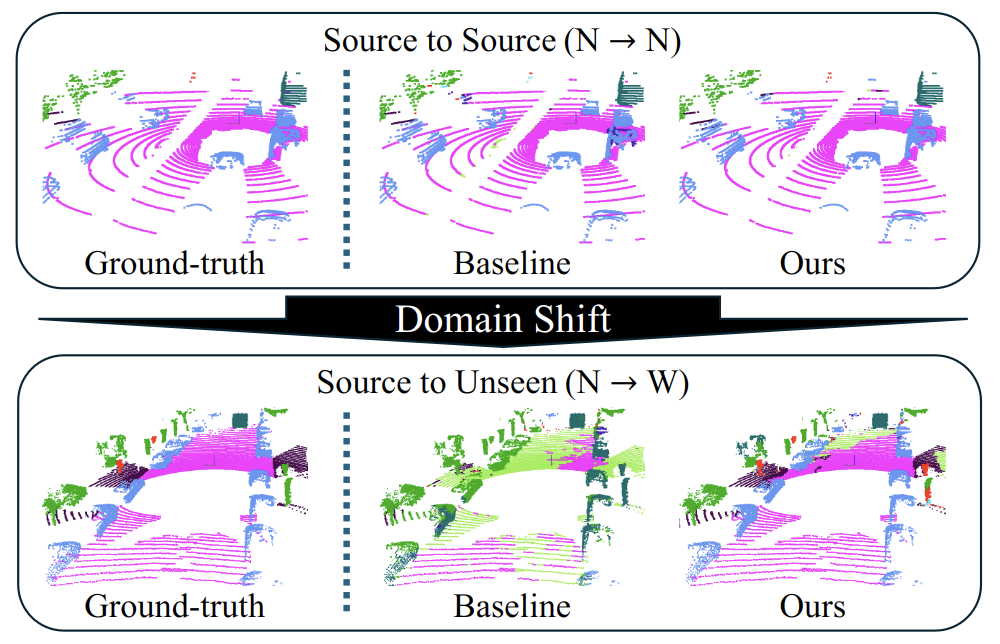
Density-aware Domain Generalization for LiDAR Semantic Segmentation
Jaeyeul Kim*, Jungwan Woo*, Ukcheol Shin, Jean Oh, Sunghoon Im
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024.
Paper
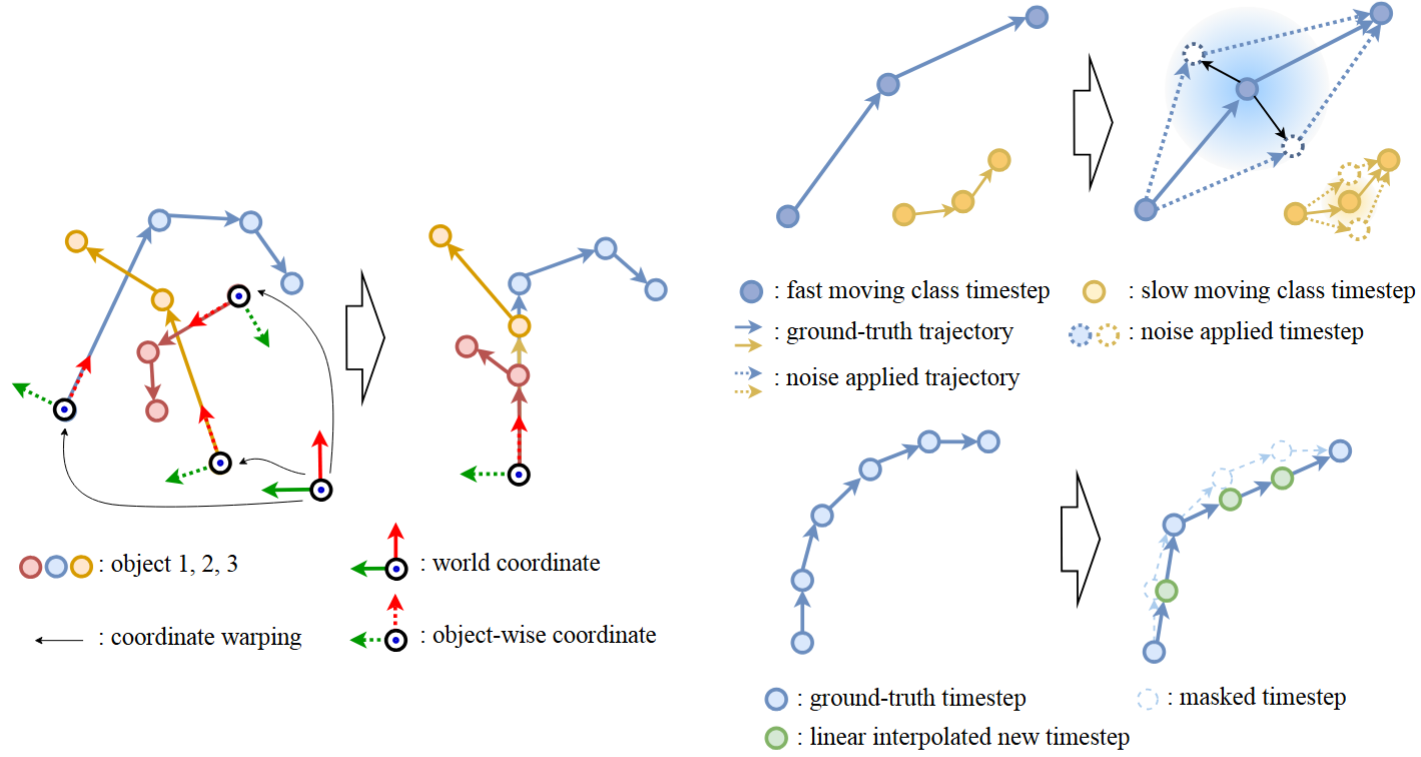
Motion Forecasting via Coordinate Transformations and Object Trajectory Modifications
Jungwan Woo*, Jaeyeul Kim*, Sunghoon Im
CVPR Workshop on Autonomous Driving (CVPRw), 2023. (2nd place in the challenge)
Paper
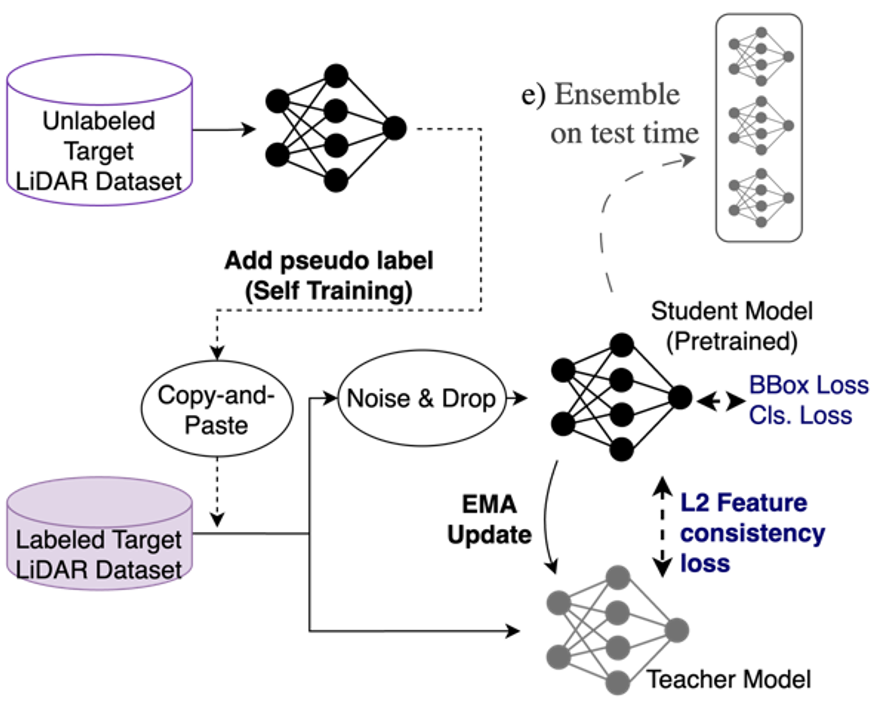
LiDAR 3D Object Detection via Self-Training and Knowledge Distillation
Jungwan Woo*, Jaeyeul Kim*, Sunghoon Im
ECCV Workshop on 3D Perception for Autonomous Driving (ECCVw), 2022. (3rd place in the challenge)
Paper
RVMOS: Range-View Moving Object Segmentation Leveraged by Semantic and Motion Features
Jaeyeul Kim*, Jungwan Woo*, Sunghoon Im
IEEE Robotics and Automation Letters (RA-L / IROS), 2022.
Paper
Awards and Achievements
- Winner, Argoverse LiDAR Scene Flow Challenge at CVPR WAD, 2024.
- DGIST Post-Graduate Research Abroad Award (DPRAA), 2024
- Visiting Researcher at Carnegie Mellon University
- Honorable Mention, Argoverse Forecasting Challenge at CVPR WAD, 2023.
- Best Robot Vision Paper Award, Asian Federation of Computer Vision (AFCV), KRoC 2023.
- 1st place, Autonomous Driving A.I. Challenge (organized by MOLIT), 2023.
- 2nd place, Autonomous Driving A.I. Challenge (organized by MOLIT), 2022.
- 3rd place, ECCV Workshop on 3D Perception for Autonomous Driving, 2022.
Projects
- Dabeeo — Advanced Deep Learning-Based Geographic Data Construction System (2020–2021)
- Developed precise 3D urban reconstruction pipelines from multi-view aerial imagery.
- P-CoE — Collaborative AI-based Remote Autonomous Driving Cloud Mobility Service System (2021–2022)
- Built camera–LiDAR fused driving datasets by performing sensor calibration on a real vehicle and collecting annotated road-driving data.
- Developed real-time perception models for depth and relative speed estimation of surrounding vehicles, as well as traffic-light detection and signal recognition.
- National Research Foundation of Korea — Outstanding Young Researcher Program (2023)
- Robust multi-camera learning for multi-task visual perception under environmental variations.
- Huvitz — Dental Intraoral Scanning Software Development (2023–2024)
- Enhanced structured-light 3D dental scanning accuracy with loop closure detection and pose graph optimization.
- Ministry of Science and ICT — Advanced AX Research Support Platform Development Project (2025)
- Implemented a cloud-based robot navigation pipeline, enabling simulation-based training and validation on the cloud and deploying navigation models to real-world robots.
Education
Integrated M.S.–Ph.D. in Electrical Engineering and Computer Science (EECS), DGIST, Korea
February 2019 – Present (Advisor: Prof. Sunghoon Im)
Visiting Researcher, Carnegie Mellon University (CMU), Pittsburgh, PA, USA
January 2024 – May 2024 (Robot Intelligence Group, Robotics Institute)
Summer Session (8 credits), Stanford University, CA, USA
June 2015 – July 2015 (Supported by DGIST Freshmen Global Leadership Program, FGLP)
B.S. in Convergence Science, DGIST, Korea
March 2015 – February 2019
Skills
- Programming Languages: Python, C++
- Deep Learning Frameworks: PyTorch, TensorFlow, JAX
- 3D Perception from Point Clouds and Images
- 3D Reconstruction and Structured-light Scanning
- Scene Flow Estimation and 3D Semantic Segmentation
- Multimodal Sensor Fusion (Camera–LiDAR)
- ROS/ROS2 and LeRobot for robot navigation and control